Publications
Selected publications. For full list see Google Scholar.
2026
- Actuators
 Modeling Soft Rehabilitation Actuators: Segmented PRB Formulations with FEM-Based CalibrationTomislav Bazina, David Liović, Jelena Srnec Novak, and Ervin KamenarActuators, 2026
Modeling Soft Rehabilitation Actuators: Segmented PRB Formulations with FEM-Based CalibrationTomislav Bazina, David Liović, Jelena Srnec Novak, and Ervin KamenarActuators, 2026Soft pneumatic glove actuators for hand rehabilitation require compact, accurate models that can be evaluated in real time. At the same time, high-fidelity finite element (FE) simulations are too slow for iterative design and control. We develop a finite element-based calibration pipeline that combines a dependency-constrained human finger kinematic model with a segmented pseudo-rigid-body (PRB) description of ribbed-bellow soft pneumatic actuators sized to individual fingers. FE models with symmetry and contact generate pressure–pose data for the MCP, PIP, and DIP spans, from which we extract per-segment bending angles and axial elongations, fit simple pressure–kinematics relations, and identify PRB parameters using basin-hopping global optimization. The calibrated PRB reproduces FE flexion–extension trajectories for index and little finger actuators with millimetric accuracy (mean segment positioning errors of approximately 2.3 mm and 0.7 mm), preserves finger-like bending localized in the bellows, and maintains negligible compression of inter-joint links (below 1.2%). The pressure–bend and pressure–elongation maps achieve near-unity adjusted R^2, and the PRB forward kinematics evaluates complete pressure trajectories in less than half a millisecond, compared with several hours for the corresponding FE simulations. This pipeline provides a practical route from detailed FE models to controller-ready reduced-order surrogates for design-space exploration and patient-specific control of soft rehabilitation actuators.
@article{bazina2026modeling, title = {Modeling Soft Rehabilitation Actuators: Segmented PRB Formulations with FEM-Based Calibration}, author = {Bazina, Tomislav and Liovi{\'c}, David and Srnec Novak, Jelena and Kamenar, Ervin}, journal = {Actuators}, year = {2026}, volume = {15}, number = {1}, pages = {22}, keywords = {soft pneumatic actuator (SPA); finger rehabilitation; pseudo-rigid-body (PRB) model; finite element method (FEM); hand kinematics; reduced-order modeling; patient-specific design}, doi = {10.3390/act15010022}, }

2025
- IEEE TNSRE
 Koopman-driven Grip Force Prediction Through EMG SensingTomislav Bazina, Ervin Kamenar, Maria Fonoberova, and Igor MezićIEEE Transactions on Neural Systems and Rehabilitation Engineering, 2025
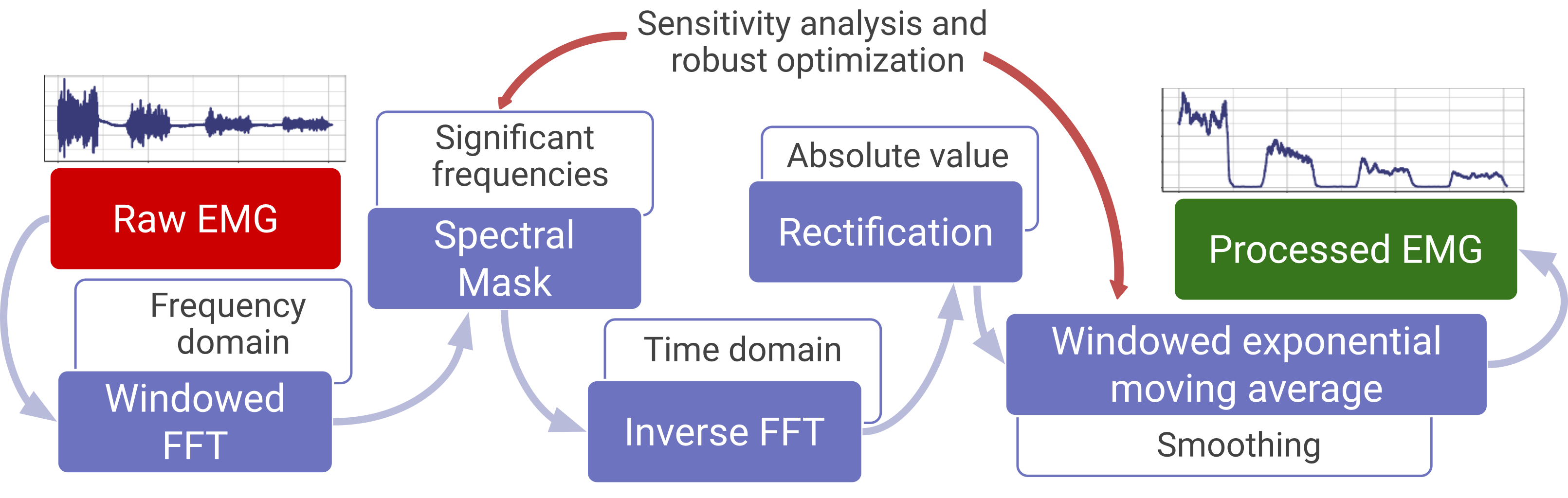
Koopman-driven Grip Force Prediction Through EMG SensingTomislav Bazina, Ervin Kamenar, Maria Fonoberova, and Igor MezićIEEE Transactions on Neural Systems and Rehabilitation Engineering, 2025Loss of hand function due to conditions like stroke or multiple sclerosis impacts daily activities. Robotic rehabilitation provides tools to restore hand function, while surface electromyography (sEMG) enables the adaptation of the device’s force output to the user’s condition, thus enhancing rehabilitation outcomes. This study focuses on accurately predicting grip force during medium wrap grasps using a single sEMG sensor pair, addressing the challenge of escalating sensor requirements. We conducted sEMG measurements on 13 subjects at two forearm positions, validating results with a hand dynamometer. Established flexible signal-processing steps achieved high peak cross-correlations between the processed sEMG signal and grip force. Influential parameters were subsequently identified through sensitivity analysis. Leveraging a novel data-driven Koopman-based approach and problem-specific data lifting, we devised a method for the estimation and short-term prediction of grip force from processed sEMG signals. The method achieved a weighted mean absolute percentage error (wMAPE) of 5.5% for grip force estimation and 17.9% for 0.5-second predictions. The methodology proved robust regarding precise electrode positioning, as the effect of sensing position on error metrics was non-significant. The algorithm executes exceptionally fast, processing, estimating, and predicting a 0.5-second sEMG signal batch in just 30 ms, facilitating real-time implementation.
@article{bazina2024koopmanIEEE, title = {Koopman-driven Grip Force Prediction Through EMG Sensing}, author = {Bazina, Tomislav and Kamenar, Ervin and Fonoberova, Maria and Mezi{\'c}, Igor}, journal = {IEEE Transactions on Neural Systems and Rehabilitation Engineering}, year = {2025}, volume = {33}, number = {}, pages = {2192-2202}, keywords = {Force;Electromyography;Muscles;Sensors;Robot sensing systems;Optimization;Dynamometers;Firing;Electrodes;Vectors;Koopman operator theory;electromyography;grip force estimation;robotic rehabilitation}, doi = {10.1109/TNSRE.2025.3576110}, }

2024
- Robotics
 Reducing Hand Kinematics by Introducing Grasp-Oriented Intra-Finger DependenciesTomislav Bazina, Goran Mauša, Saša Zelenika, and Ervin KamenarRobotics, 2024
Reducing Hand Kinematics by Introducing Grasp-Oriented Intra-Finger DependenciesTomislav Bazina, Goran Mauša, Saša Zelenika, and Ervin KamenarRobotics, 2024Loss of hand functions, often manifesting in the form of weakness or spasticity from conditions like stroke or multiple sclerosis, poses challenges in performing activities of daily living (ADLs). The broad area of rehabilitation robotics provides the tools and knowledge necessary for implementing efficient restorative therapies. These therapies aim to improve hand functionality with minimal therapist intervention. However, the human hand evolved for various precision and power gripping tasks, with its intricate anatomy featuring a large number of degrees of freedom—up to 31—which hinder its modeling in many rehabilitation scenarios. In the process of designing prosthetic devices, instrumented gloves, and rehabilitation devices, there is a clear need to obtain simplified rehabilitation-oriented hand models without compromising their representativeness across the population. This is where the concept of kinematic reduction, focusing on specific grasps, becomes essential. Thus, the objective of this study is to uncover the intra-finger dependencies during finger flexion/extension by analyzing a comprehensive database containing recorded trajectories for 23 different functional movements related to ADLs, involving 77 test subjects. The initial phase involves data wrangling, followed by correlation analysis aimed at selecting 116 dependency-movement relationships across all grasps. A regularized generalized linear model is then applied to select uncorrelated predictors, while a linear mixed-effect model, with reductions based on both predictor significance and effect size, is used for modeling the dependencies. As a final step, agglomerative clustering of models is performed to further facilitate flexibility in tradeoffs in hand model accuracy/reduction, allowing the modeling of finger flexion extensions using 5–15 degrees of freedom only.
@article{bazina2024reducing, title = {Reducing Hand Kinematics by Introducing Grasp-Oriented Intra-Finger Dependencies}, author = {Bazina, Tomislav and Mau{\v{s}}a, Goran and Zelenika, Sa{\v{s}}a and Kamenar, Ervin}, journal = {Robotics}, volume = {13}, number = {6}, pages = {82}, year = {2024}, publisher = {MDPI}, doi = {10.3390/robotics13060082}, } - Actuators
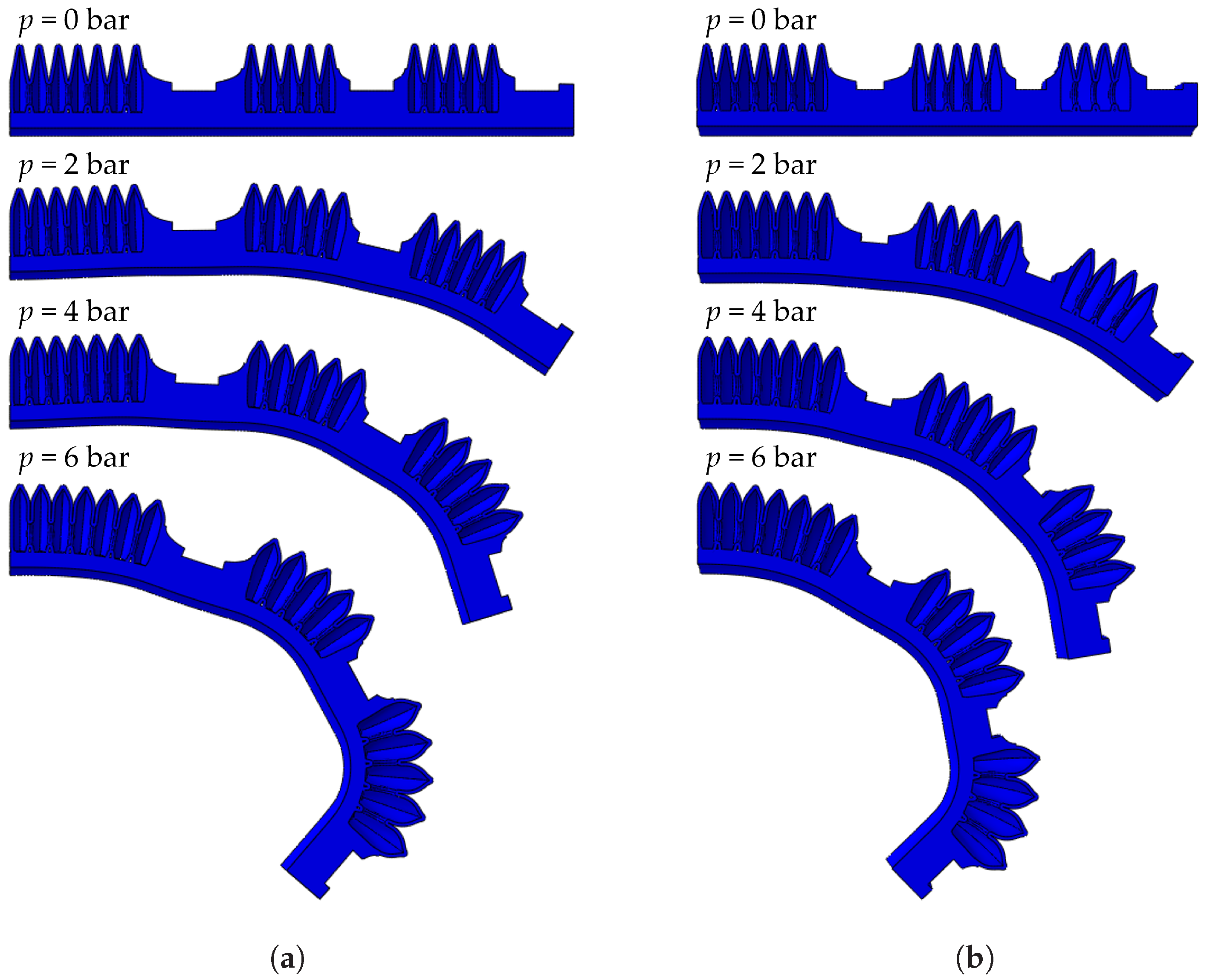
 Development of Rehabilitation Glove: Soft Robot ApproachTomislav Bazina, Marko Kladarić, Ervin Kamenar, and Goran GregovIn , 2024
Development of Rehabilitation Glove: Soft Robot ApproachTomislav Bazina, Marko Kladarić, Ervin Kamenar, and Goran GregovIn , 2024This study describes the design, simulation, and development process of a rehabilitation glove driven by soft pneumatic actuators. A new, innovative finger soft actuator design has been developed through detailed kinematic and workspace analysis of anatomical fingers and their actuators. The actuator design combines cylindrical and ribbed geometries with a reinforcing element—a thicker, less extensible structure—resulting in an asymmetric cylindrical bellow actuator driven by positive pressure. The performance of the newly designed actuator for the rehabilitation glove was validated through numerical simulation in open-source software. The simulation results indicate actuators’ compatibility with human finger trajectories. Additionally, a rehabilitation glove was 3D-printed from soft materials, and the actuator’s flexibility and airtightness were analyzed across different wall thicknesses. The 0.8 mm wall thickness and thermoplastic polyurethane (TPU) material were chosen for the final design. Experiments confirmed a strong linear relationship between bending angle and pressure variations, as well as joint elongation and pressure changes. Next, pseudo-rigid kinematic models were developed for the index and little finger soft actuators, based solely on pressure and link lengths. The workspace of the soft actuator, derived through forward kinematics, was visually compared to that of the anatomical finger and experimentally recorded data. Finally, an ergonomic assessment of the complete rehabilitation glove in interaction with the human hand was conducted.
@inproceedings{bazina2024development, title = {Development of Rehabilitation Glove: Soft Robot Approach}, author = {Bazina, Tomislav and Kladari{\'c}, Marko and Kamenar, Ervin and Gregov, Goran}, journal = {Actuators}, volume = {13}, number = {12}, pages = {472}, year = {2024}, publisher = {MDPI}, doi = {10.3390/act13120472}, }


2023
- SciRobot
 Control of soft robots with inertial dynamicsDavid A Haggerty, Michael J Banks, Ervin Kamenar, Alan B Cao, and 3 more authorsScience robotics, 2023
Control of soft robots with inertial dynamicsDavid A Haggerty, Michael J Banks, Ervin Kamenar, Alan B Cao, and 3 more authorsScience robotics, 2023Soft robots promise improved safety and capability over rigid robots when deployed near humans or in complex, delicate, and dynamic environments. However, infinite degrees of freedom and the potential for highly nonlinear dynamics severely complicate their modeling and control. Analytical and machine learning methodologies have been applied to model soft robots but with constraints: quasi-static motions, quasi-linear deflections, or both. Here, we advance the modeling and control of soft robots into the inertial, nonlinear regime. We controlled motions of a soft, continuum arm with velocities 10 times larger and accelerations 40 times larger than those of previous work and did so for high-deflection shapes with more than 110° of curvature. We leveraged a data-driven learning approach for modeling, based on Koopman operator theory, and we introduce the concept of the static Koopman operator as a pregain term in optimal control. Our approach is rapid, requiring less than 5 min of training; is computationally low cost, requiring as little as 0.5 s to build the model; and is design agnostic, learning and accurately controlling two morphologically different soft robots. This work advances rapid modeling and control for soft robots from the realm of quasi-static to inertial, laying the groundwork for the next generation of compliant and highly dynamic robots.
@article{haggerty2023control, title = {Control of soft robots with inertial dynamics}, author = {Haggerty, David A and Banks, Michael J and Kamenar, Ervin and Cao, Alan B and Curtis, Patrick C and Mezi{\'c}, Igor and Hawkes, Elliot W}, journal = {Science robotics}, volume = {8}, number = {81}, pages = {eadd6864}, year = {2023}, publisher = {American Association for the Advancement of Science}, doi = {10.1126/scirobotics.add6864}, } - Materials
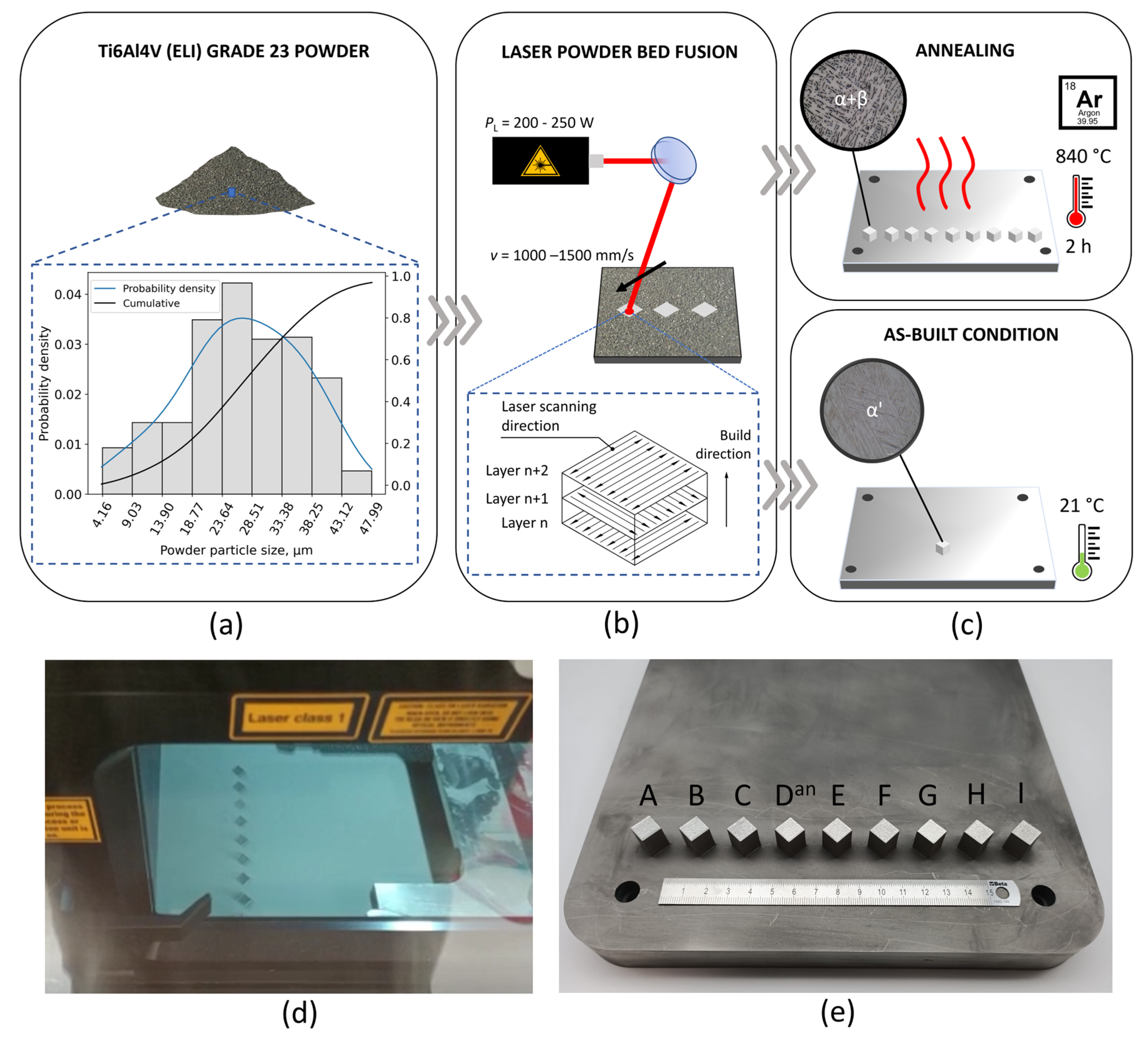 Nano-Mechanical Behavior of Ti6al4v Alloy Manufactured by Laser Powder Bed FusionDavid Liović, Marina Franulovic, Ervin Kamenar, and Dražan KozakMaterials, 2023
Nano-Mechanical Behavior of Ti6al4v Alloy Manufactured by Laser Powder Bed FusionDavid Liović, Marina Franulovic, Ervin Kamenar, and Dražan KozakMaterials, 2023The microstructure of Ti6Al4V alloy, manufactured using laser powder bed fusion (L-PBF), is affected by process parameters and heat treatment. However, their influence on the nano-mechanical behavior of this widely applicable alloy is still unknown and scarcely reported. This study aims to investigate the influence of the frequently used annealing heat treatment on mechanical properties, strain-rate sensitivity, and creep behavior of L-PBF Ti6Al4V alloy. Furthermore, the influence of different utilized L-PBF laser power–scanning speed combinations on mechanical properties of annealed specimens has been studied as well. It has been found that the effect of high laser power remains present in the microstructure even after annealing, resulting in increase in nano-hardness. Moreover, the linear relation between the Young’s modulus and the nano-hardness after annealing has been established. Thorough creep analysis revealed dislocation motion as a dominant deformation mechanism, both for as-built and annealed conditions of the specimens. Although annealing heat treatment is beneficial and widely recommended, it reduces the creep resistance of Ti6Al4V alloy manufactured using L-PBF. The results presented within this research article contribute to the L-PBF process parameter selection, as well as to understanding the creep behavior of these novel and widely applicable materials.
@article{liovic4255025nano, title = {Nano-Mechanical Behavior of Ti6al4v Alloy Manufactured by Laser Powder Bed Fusion}, author = {Liovi{\'c}, David and Franulovic, Marina and Kamenar, Ervin and Kozak, Dra{\v{z}}an}, journal = {Materials}, volume = {16}, number = {12}, year = {2023}, publisher = {MDPI}, doi = {10.3390/ma16124341}, } - Angle Orthod
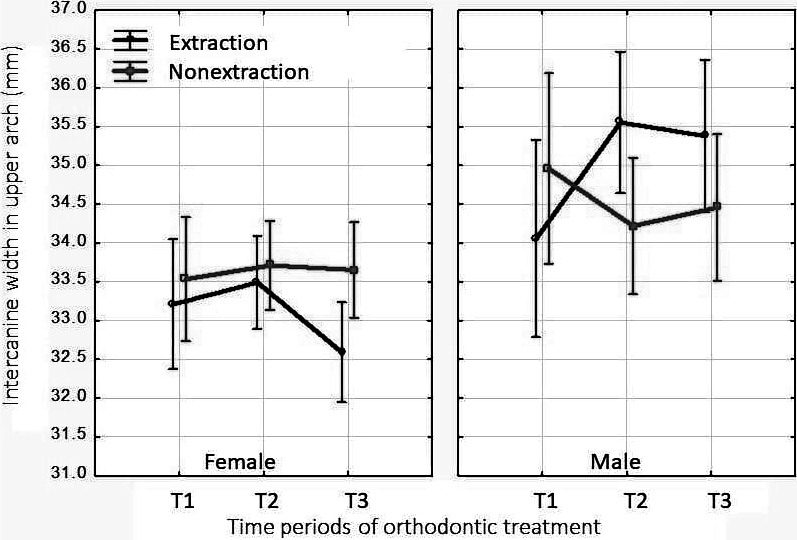 Association between arch width changes and long-term stability 20 years after orthodontic treatment with and without extractionsVjera Perkovic, Moody Alexander, Preston Greer, Ervin Kamenar, and 1 more authorThe Angle orthodontist, 2023
Association between arch width changes and long-term stability 20 years after orthodontic treatment with and without extractionsVjera Perkovic, Moody Alexander, Preston Greer, Ervin Kamenar, and 1 more authorThe Angle orthodontist, 2023Objectives: To investigate long-term stability 20 years after orthodontic treatment and the association with arch width changes during treatment. Materials and Methods: This retrospective study investigated 103 patients with Class I and II malocclusions treated with fixed appliances with and without extractions. The sample was treated by one experienced orthodontist and collected from a private orthodontic office. Dental casts were obtained pretreatment (T1), posttreatment (T2), and long-term postretention (T3); they were scanned and converted to STL files. Measurements were evaluated in for the upper and lower arch: intercanine width (IC), intermolar (IM) width, Little’s irregularity index (LII).
@article{perkovic2023association, title = {Association between arch width changes and long-term stability 20 years after orthodontic treatment with and without extractions}, author = {Perkovic, Vjera and Alexander, Moody and Greer, Preston and Kamenar, Ervin and Anic-Milosevic, Sandra}, journal = {The Angle orthodontist}, volume = {93}, number = {3}, pages = {261}, year = {2023}, publisher = {Edward H Angle Education and Research Foundation, Inc}, doi = {10.2319/080822-557.1}, } - Actuators
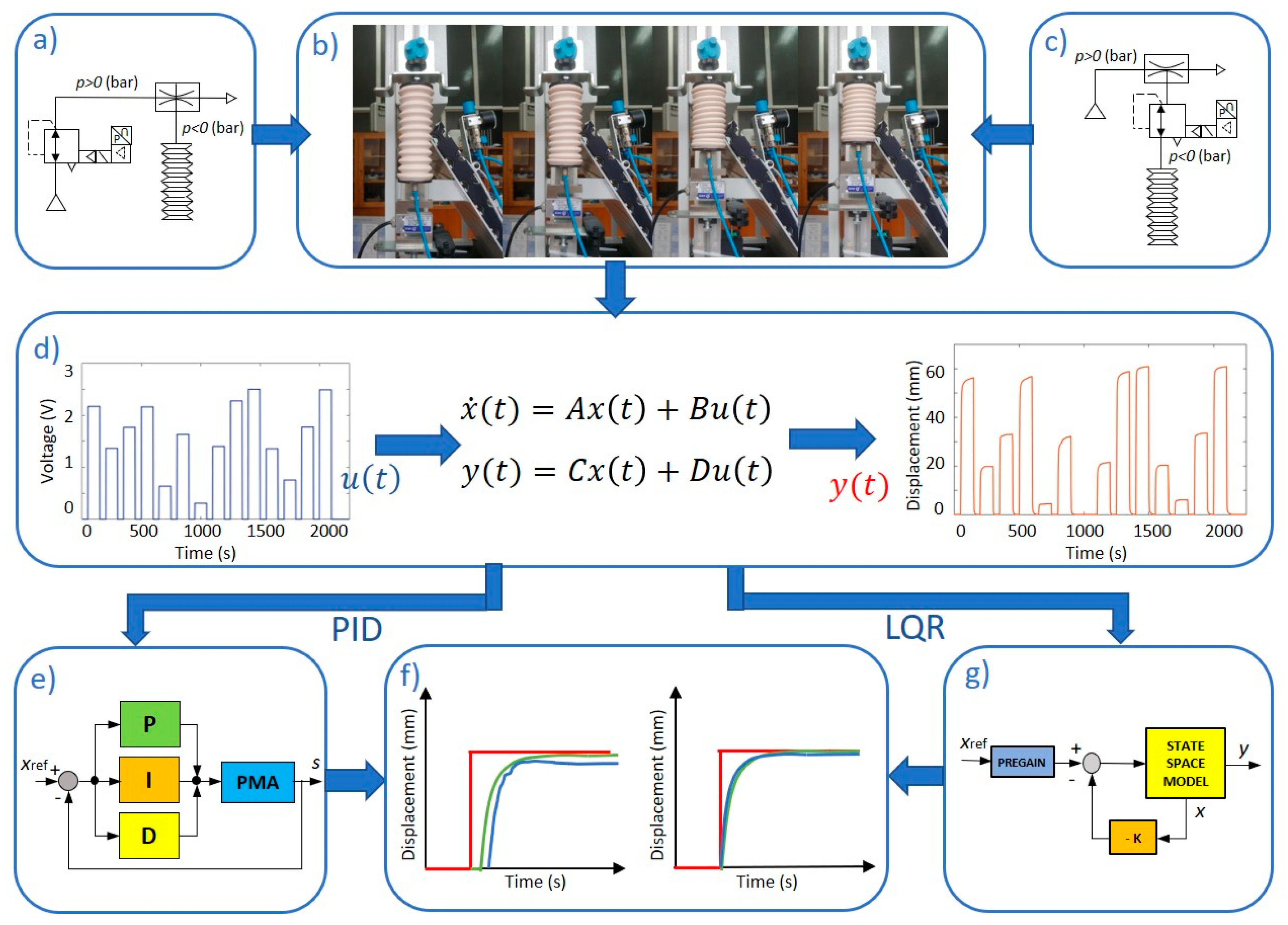 Position Control of a Cost-Effective Bellow Pneumatic Actuator Using an LQR ApproachGoran Gregov, Samuel Pincin, Antonio Šoljić, and Ervin KamenarIn Actuators , 2023
Position Control of a Cost-Effective Bellow Pneumatic Actuator Using an LQR ApproachGoran Gregov, Samuel Pincin, Antonio Šoljić, and Ervin KamenarIn Actuators , 2023Today, we are witnessing an increasing trend in the number of soft pneumatic actuator solutions in industrial environments, especially due to their human-safe interaction capabilities. An interesting solution in this frame is a vacuum pneumatic muscle actuator (PMA) with a bellow structure, which is characterized by a high contraction ratio and the ability to generate high forces considering its relatively small dimensions. Moreover, such a solution is generally very cost-effective since can be developed by using easily accessible, off-the-shelf components combined with additive manufacturing procedures. The presented research analyzes the precision positioning performances of a newly developed cost-effective bellow PMA in a closed-loop setting, by utilizing a Proportional-Integral-Derivative (PID) controller and a Linear Quadratic Regulator (LQR). In a first instance, the system identification was performed and a numerical model of the PMA was developed. It was experimentally shown that the actuator is characterized by nonlinear dynamical behavior. Based on the numerical model, a PID controller was developed as a benchmark. In the next phase, an LQR that involves a nonlinear pregain term was built. The point-to-point positioning experimental results showed that both controllers allow fast responses without overshoot within the whole working range. On the other hand, it was discovered that the LQR with the corresponding nonlinear pregain term allows an error of a few tens of micrometers to be achieved across the entire working range of the muscle. Additionally, two different experimental pneumatic solutions for indirect and direct vacuum control were analyzed with the aim of investigating the PMA response time and comparing their energy consumption. This research contributes to the future development of the pneumatically driven mechatronics systems used for precise position control.
@inproceedings{gregov2023position, title = {Position Control of a Cost-Effective Bellow Pneumatic Actuator Using an LQR Approach}, author = {Gregov, Goran and Pincin, Samuel and {\v{S}}olji{\'c}, Antonio and Kamenar, Ervin}, booktitle = {Actuators}, volume = {12}, number = {2}, pages = {73}, year = {2023}, publisher = {MDPI}, doi = {10.3390/act12020073}, }




2022
- Medicina Hand model with dependency constrained joints for applications in rehabilitation roboticsTomislav Bazina, Ervin Kamenar, Saša Zelenika, Nelida Črnjarić-Žic, and 1 more authormedicina, 2022
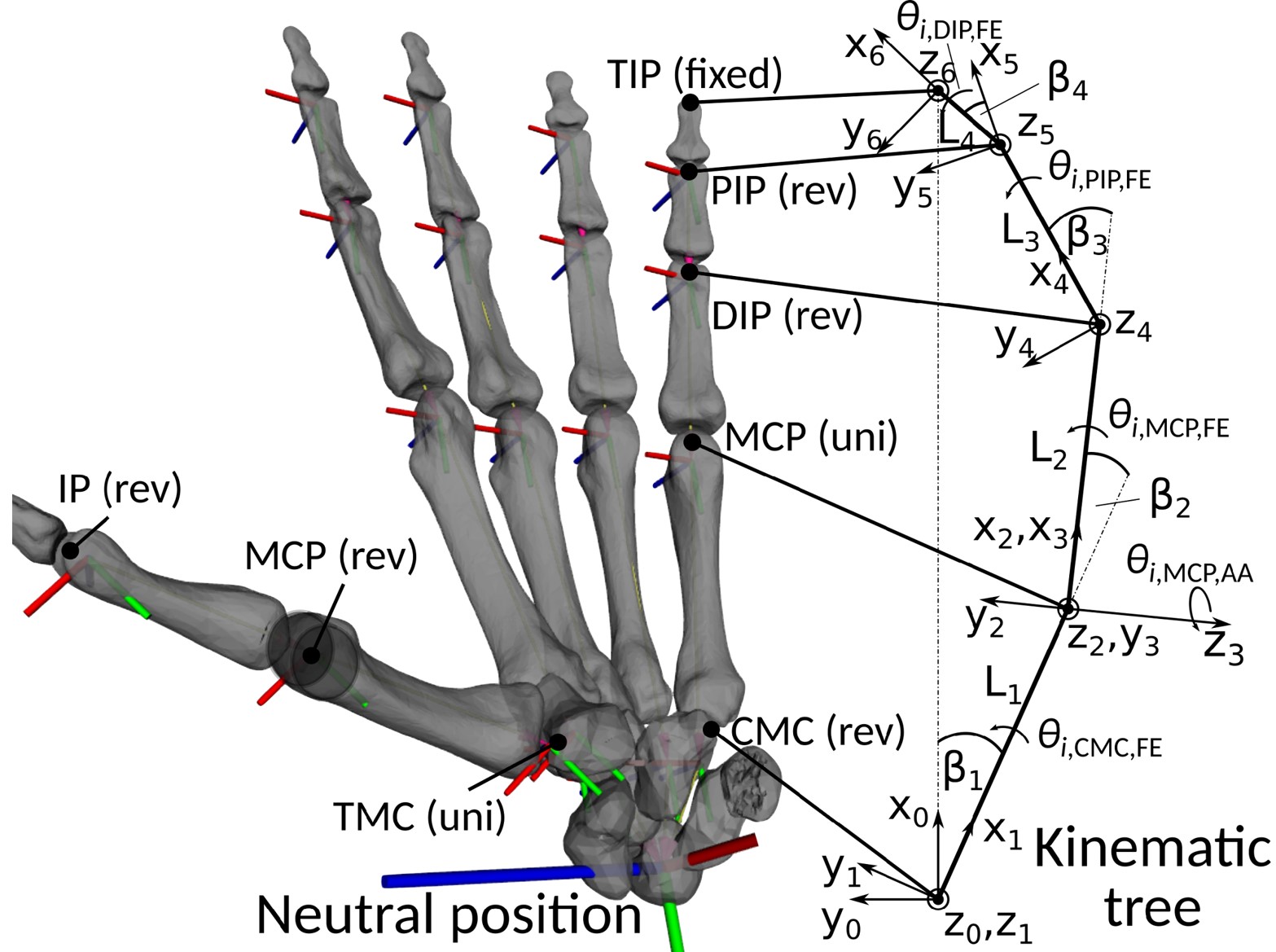
Aim: This work presents a method for developing a simplified but efficient model of the complex human hand kinematics with the aim of its implementation in rehabilitation robotics. Material and methods: The approach incorporates modularity by simplifying the available model comprising 24 degrees of freedom (DOFs) to 9 DOFs, with the introduction of additional joint coupling parameters specific to different grasp types. The effect of dependent joints to the ranges-of-motion (ROMs) of the model is investigated and compared to the anatomical one. The index, middle, ring and little finger solutions to forward and inverse kinematics problems are then acquired. The implementation of the model, based on the median male bones dimensions, is made available in the open-source Robot Operating System (ROS) framework. Results By including additional four inclination angles per finger, the devised kinematic hand model encompasses also finger curvatures, resulting in significant positioning accuracy improvements compared to the conventional model. The used 3D spatial position improvement metrics are the mean absolute (MAE) and mean relative errors (MRE). The dependent joint position MAEs range from 0.22 to 0.34 cm, while MREs range from 2.8 and 3.5%, whereas the highest absolute and relative errors during fingertip positioning can reach 0.5 cm and 10.5%, respectively. Conclusion: The performed investigation allowed establishing that by modelling finger curvature and assuring the adaptability of the model to a variety of human hands and rehabilitation modalities through joint dependency, represents the best approach towards a relatively simple and applicable rehabilitation model with functional human-like hand movements.
@article{bazina2022hand, title = {Hand model with dependency constrained joints for applications in rehabilitation robotics}, author = {Bazina, Tomislav and Kamenar, Ervin and Zelenika, Sa{\v{s}}a and {\v{C}}rnjari{\'c}-{\v{Z}}ic, Nelida and Schnurrer-Luke-Vrbani{\'c}, Tea}, journal = {medicina}, volume = {58}, number = {4}, pages = {385--398}, year = {2022}, publisher = {Hrvatski liječnički zbor - Podružnica Rijeka Trg Republike Hrvatske 2/I, p.p. 227, 51000 Rijeka, Croatia}, doi = {10.21860/medflum2022_284696}, }
2021
- Angle Orthod
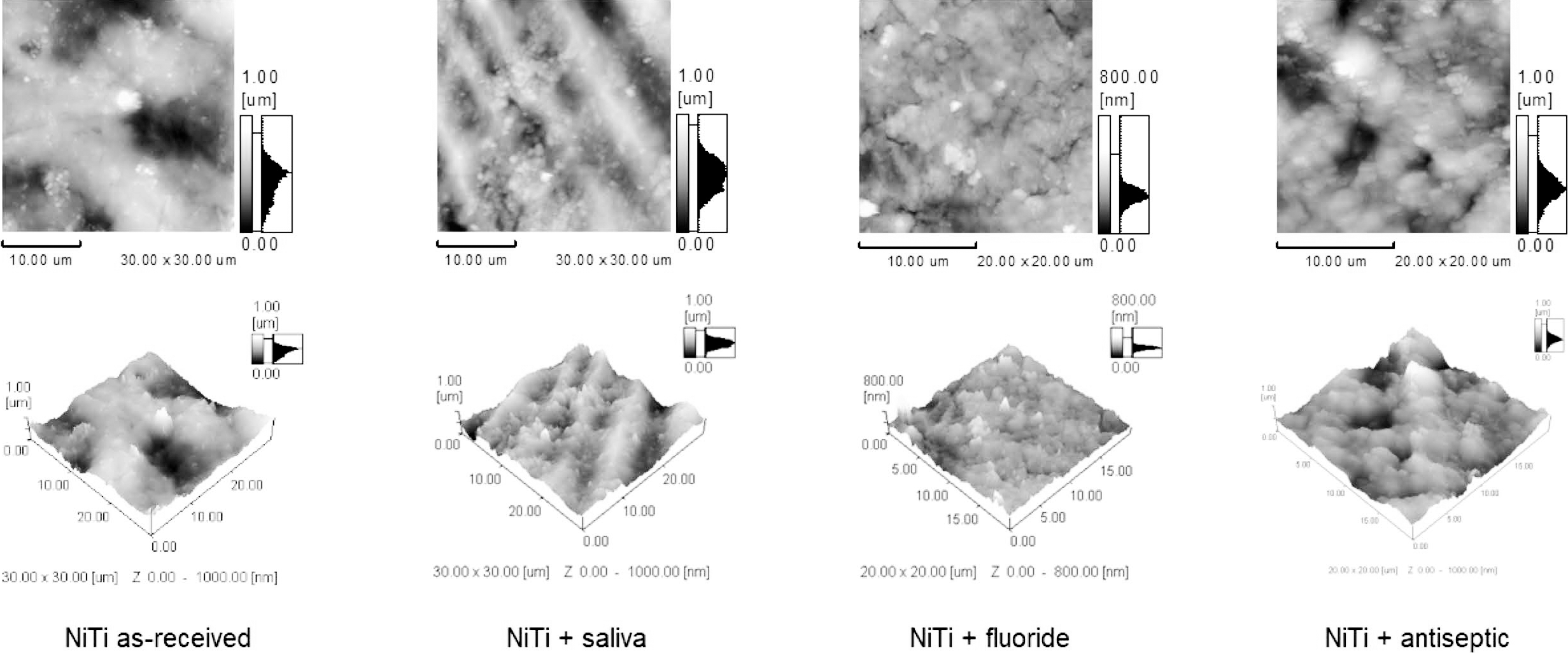 Influence of intraoral application of antiseptics and fluorides during orthodontic treatment on corrosion and mechanical characteristics of nickel-titanium alloy in orthodontic appliancesTihana Zibar Belasic, Biljana Pejova, Helena Otmacic Curkovic, Ervin Kamenar, and 2 more authorsThe Angle Orthodontist, 2021
Influence of intraoral application of antiseptics and fluorides during orthodontic treatment on corrosion and mechanical characteristics of nickel-titanium alloy in orthodontic appliancesTihana Zibar Belasic, Biljana Pejova, Helena Otmacic Curkovic, Ervin Kamenar, and 2 more authorsThe Angle Orthodontist, 2021Objectives: To explore whether the commercial agents recommended for controlling dental biofilm formation had a significant effect in vivo on mechanical and corrosion properties of nickel-titanium (NiTi) alloy. Materials and Methods: NiTi archwires (dimensions 0.508 × 0.508 mm) were collected from 36 orthodontic patients aged 13–42 years after a 3-month intraoral exposure. Three experimental groups were formed: (1) subjects conducting regular oral hygiene, (2) subjects who used fluorides for intensive prophylaxis for the first month, and (3) subjects who used chlorhexidine in the same manner. Corrosion behavior, surface characteristics, stiffness, hardness, and friction were analyzed. Results: Exposure to intraoral conditions significantly reduced the stiffness and hardness of the NiTi alloy (P ≤ .015). Fluoride tended to reduce stiffness and hardness more than did saliva or antiseptic, but not significantly. Roughness and friction were not significantly influenced by oral exposure. Intraoral aging predominantly produced general corrosion independent of the adjuvant prophylactic agent, although localized corrosion may also have occurred. Conclusions: Fluorides and the antiseptic chlorhexidine do not increase corrosion more than saliva itself, nor do they further modify the mechanical properties of the NiTi alloy.
@article{belasic2021influence, title = {Influence of intraoral application of antiseptics and fluorides during orthodontic treatment on corrosion and mechanical characteristics of nickel-titanium alloy in orthodontic appliances}, author = {Belasic, Tihana Zibar and Pejova, Biljana and Curkovic, Helena Otmacic and Kamenar, Ervin and Cetenovic, Bojana and Spalj, Stjepan}, journal = {The Angle Orthodontist}, volume = {91}, number = {4}, pages = {528--537}, year = {2021}, publisher = {Edward H. Angle Society of Orthodontists}, doi = {10.2319/052620-480.1}, }

2020
- Lecture Notes
 Application of Koopman-Based Control in Ultrahigh-Precision PositioningSaša Zelenika, Ervin Kamenar, Milan Korda, and Igor MezićThe Koopman Operator in Systems and Control: Concepts, Methodologies, and Applications, 2020
Application of Koopman-Based Control in Ultrahigh-Precision PositioningSaša Zelenika, Ervin Kamenar, Milan Korda, and Igor MezićThe Koopman Operator in Systems and Control: Concepts, Methodologies, and Applications, 2020Ultrahigh-precision positioning devices are of outmost importance in microsystems’ technologies and precision engineering. The frictional disturbances of mechanical elements in relative motion often limit their positioning performances. If nanometric positioning precision and accuracy are aimed for, frictional disturbances have thus to be identified, modeled and compensated for via appropriate control algorithms. Suitable experimental setups are therefore employed to study the effects of frictional disturbances. The parameters related to state-of-the-art friction models are experimentally identified. Different control algorithms, such as a PID controller, a feedforward controller, and adaptive controllers, are experimentally and numerically validated and compared. It is proven that adaptive controllers enable nanometric precision positioning, but in point-to-point positioning applications can give rise to large overshoots and issues related to lengthy settling times. It is shown that these problems can be minimized by employing the Koopman-based model predictive control that allows simplifying the modeling burden while successfully compensating the frictional effects.
@article{zelenika2020application, title = {Application of Koopman-Based Control in Ultrahigh-Precision Positioning}, author = {Zelenika, Sa{\v{s}}a and Kamenar, Ervin and Korda, Milan and Mezi{\'c}, Igor}, journal = {The Koopman Operator in Systems and Control: Concepts, Methodologies, and Applications}, pages = {451--479}, year = {2020}, publisher = {Springer}, doi = {10.1007/978-3-030-35713-9_17}, }

2019
- Proc. Inst. Mech. Eng. C J. Mech. Eng. Sci.
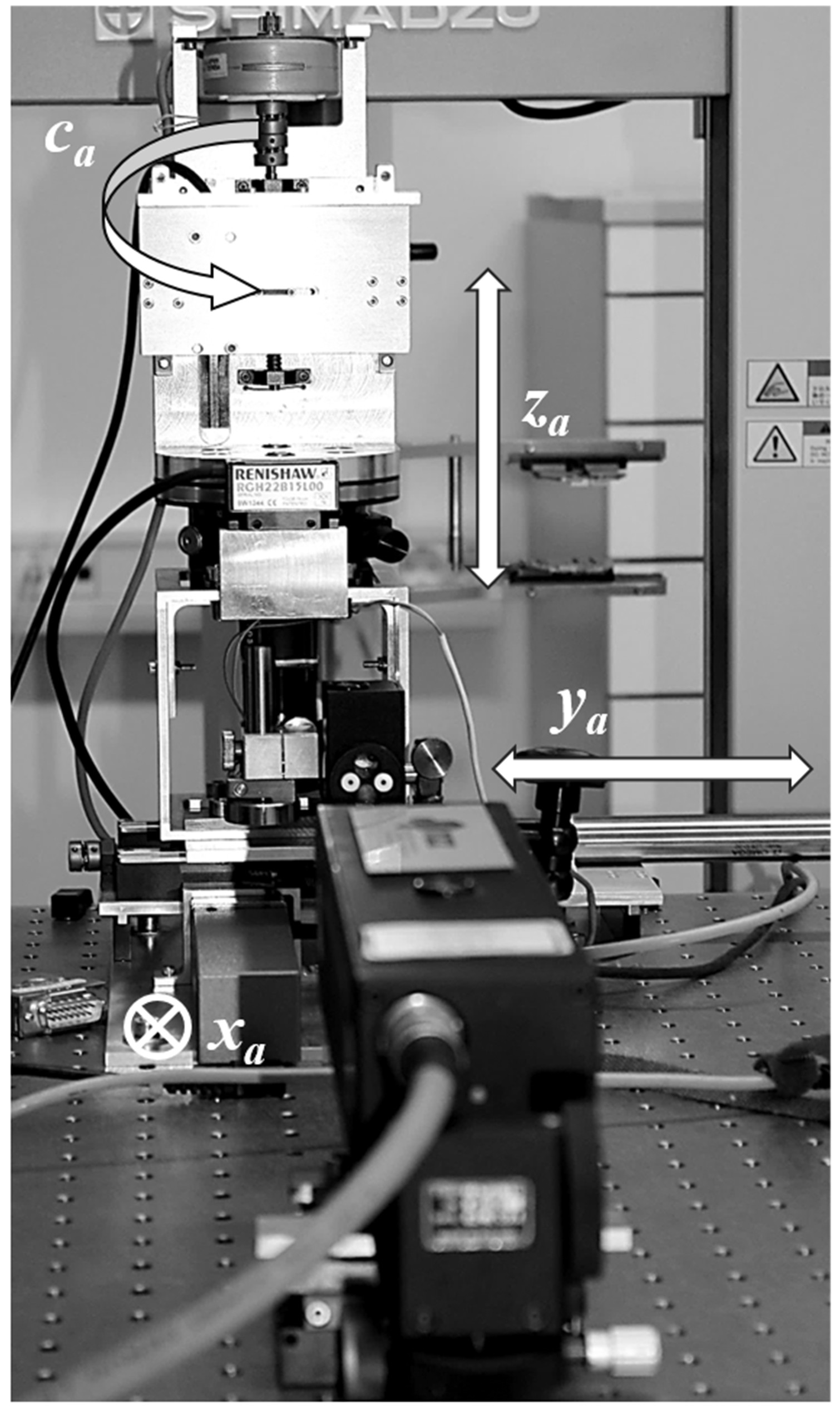
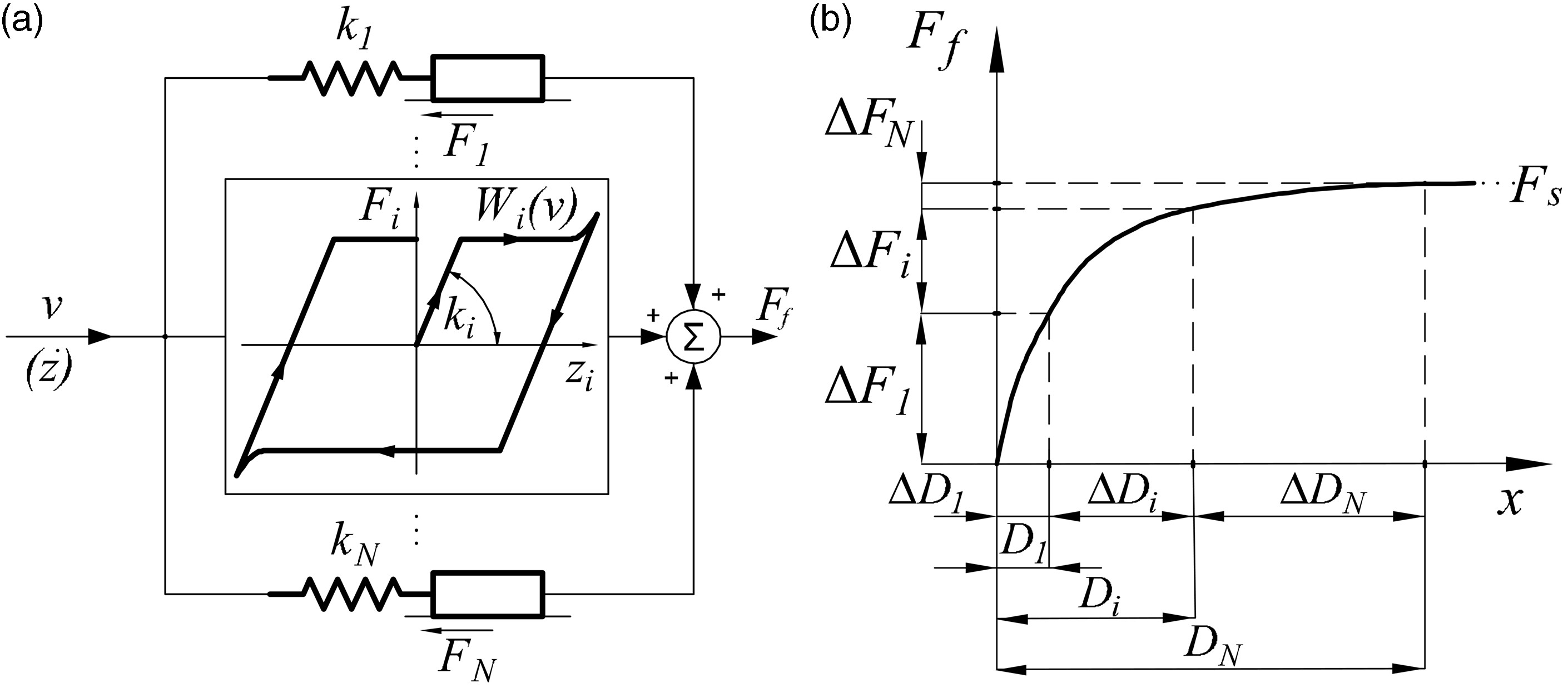 Issues in validation of pre-sliding friction models for ultra-high precision positioningErvin Kamenar, and Saša ZelenikaProceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2019
Issues in validation of pre-sliding friction models for ultra-high precision positioningErvin Kamenar, and Saša ZelenikaProceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, 2019Friction is one of the main disturbances in nanometric positioning. Recently, it was shown that ultra-high precision positioning typically happens in the pre-sliding motion regime where friction is characterized by an elasto-plastic nonlinear hysteretic behavior with a marked stochastic variability. With the aim of providing the tools for the development of robust control typologies for ultra-high precision mechatronics devices, different pre-sliding friction models are thus considered in this work. The most relevant ones are hence experimentally validated, as well as compared in terms of the complexity of identifying their characteristic parameters and of simulating the factual dynamic response. It is hence shown that the generalized Maxwell-slip model can account for all the important pre-sliding frictional effects in nanometric positioning applications. A thorough sensitivity analysis of the parameters of the generalized Maxwell-slip model model is therefore performed allowing to establish that three Maxwell-slip blocks are the minimum needed to approximate the behavior of the real precision positioning systems, six blocks allow representing excellently the real behavior, while the slower dynamics, which induces a difficult real-time implementation, with a very limited gain in terms of model accuracy, does not justify the usage of a larger number of elements.
@article{kamenar2019issues, title = {Issues in validation of pre-sliding friction models for ultra-high precision positioning}, author = {Kamenar, Ervin and Zelenika, Sa{\v{s}}a}, journal = {Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science}, volume = {233}, number = {3}, pages = {997--1006}, year = {2019}, publisher = {SAGE Publications Sage UK: London, England}, doi = {10.1177/0954406218758797}, }

2017
- Mech based des struc
 Nanometric positioning accuracy in the presence of presliding and sliding friction: Modelling, identification and compensationErvin Kamenar, and Saša ZelenikaMechanics based design of structures and machines, 2017
Nanometric positioning accuracy in the presence of presliding and sliding friction: Modelling, identification and compensationErvin Kamenar, and Saša ZelenikaMechanics based design of structures and machines, 2017Presliding and sliding frictional effects, limiting the performances of ultrahigh precision mechatronics devices, are studied in this work. The state-of-the-art related to frictional behavior in both motion regimes is, hence, considered, and the generalized Maxwell-slip (GMS) friction model is adopted to characterize frictional disturbances present in a micromanipulation device. All the parameters of the model are identified via experimental set-ups and included in the overall MATLAB/SIMULINK model. With the aim of compensating frictional effects, the modelled response of the system is thus compared to experimental results when using proportional-integral-derivative (PID) control, feed-forward model-based compensation and a self-tuning adaptive regulator. The adaptive regulator proves to be the most efficient and is, hence, used in the final repetitive point-to-point positioning tests allowing to achieve nanometric precision and accuracy.
@article{kamenar2017nanometric, title = {Nanometric positioning accuracy in the presence of presliding and sliding friction: Modelling, identification and compensation}, author = {Kamenar, Ervin and Zelenika, Sa{\v{s}}a}, journal = {Mechanics based design of structures and machines}, volume = {45}, number = {1}, pages = {111--126}, year = {2017}, publisher = {Taylor \& Francis}, doi = {10.1080/15397734.2016.1149487}, }
