Control of mechatronic systems 2025/2026
Academic year 2025/2026
ReactorX-200:
This project focuses on working with the ReactorX-200 robotic arm (5 degrees of freedom, 360° rotation) using the ROS 2 environment on Linux. In the first phase, students learn the fundamentals of ROS 2 and basic Linux usage. By the ninth week, they complete a set of system familiarization exercises, each thoroughly documented as a seminar report, including video recordings of robot launches, visualizations, and test runs. In the final six weeks, the team develops and demonstrates a pick-and-place task in which the robotic arm grasps and moves an arbitrary object from one position to another. The final deliverable is a recorded video showcasing the successful pick-and-place demonstration.
Keywords:
ROS 2; ReactorX-200; pick-and-place
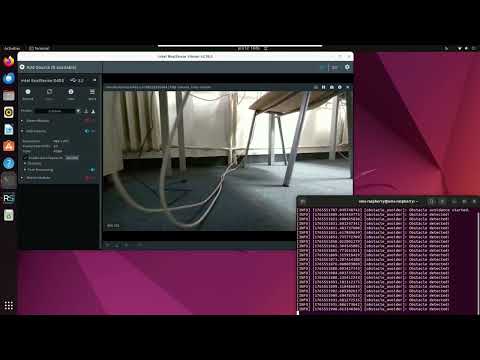
Mobile robot:
This project involves hands-on work with the Create 3 mobile robot using the ROS 2 ecosystem on Linux. During the first three weeks, students learn the fundamentals of ROS 2 and basic Linux operation. By week nine, they complete a series of system familiarization exercises, implemented through various example tasks and documented in detail as a seminar report, including video recordings of robot launches, visualizations, and experiments. In the final six weeks, the team integrates a LiDAR sensor and develops a demonstration of robot motion in an indoor environment. The final deliverable is a recorded video showing the robot navigating from point A to point B along a defined trajectory while detecting and avoiding obstacles.
Keywords:
ROS 2; Create 3; LiDAR navigation
Watch on YouTube: https://www.youtube.com/watch?v=5dwuDrBsR5k
Koopman predictins of grip force via EMG
This project aims to develop calibration procedures and estimation models that establish a functional relationship between sEMG (surface electromyography) signals and hand grip-force measurements obtained from a dynamometer. Laboratory work uses a Vernier Go Direct® Hand Dynamometer, Shimmer3 EMG sensors, and software tools including Python and Robot Operating System 2 (ROS 2). The project builds on an existing ROS 2 integration of the devices, where dynamometer calibration and optimal sEMG signal-processing procedures have already been implemented. The main focus is to apply Koopman-based approaches for grip-force estimation and prediction from sEMG data.
Keywords:
Koopman operator; sEMG; grip-force estimation